
|
| |
|
Строительный блокнот Активные передающие антенны Если вибратор не содержит сосредоточенных и распределенных нагрузок, то матрица А, за исключением последнего столбца, - тёплицева, поэтому доста. точно вычислить ее первый столбец, а остальные найти из сойтношения Атр = А1, 9= /п-р -j-l,/n,/7=l.....2M-i-l. где Aqi - первый столбец А при Zn=0. Для симметричного вибратора / п=/ . Это дает возюжность уменьшить число неизвестных до М+1, что и определяет порядок матрицы А, элементы которой вычисляются как Amp=Agi+A(m+n)i, т, р=1,.., М+1. К элементам этой матрицы добавляют слагаемые, учитывающие сопротивления нагрузок. Найденные из (38) амплитуды токов In позволяют рассчитать все параметры вибратора: входное сопротивление диаграмма направленности / (в) = ] 4 А sine 2 -7- cos [(2л- 1) А sin6]; n=i h действующая длина 1н=я/(е ). где Gm - направление главного максимума ДН; сопротивление излучения я 2= 60 J /(в) /*(в) sinGde. Если потери мощности в распределенном поверхностном сопротивлении Z вибратора огсутсгвуют, го сопротивление излучения находится по формуле n y?2=ReZa-2 / (s )PReZ ; коэффициент направленного действия и КПД D = 30 (А /д)2 ?,. ria = /?,/Re Za - Описанная методика решения интегрального уравнения Халлена удобна для вычислений на ЭВМ. Кроме нее в литературе часто встречается аналогичная ей методика вычисления параметров линейных вибраторов, осиоваииая на решении интеграчьного уравнения Поклингтона [13]. Во МНОГИХ случаях <а качестве излучателей АПА метрового и дециметрового диапазонов волн целесообразно использовать укороченные вибраторы. Известно, что с уменьшением электрической длины активная составляющая Ra входного сопротивления вибратора падает пропорционально квадрату длины (/Д), а реактивная Хя имеет емкостный характер и увеличивается (по модулю) пропорционально Х/Л Несимметричный вибратор с длиной плеча менее 0,1Я представляет собой высокодобротную нагрузку для оконечного каскада активного элемента АПА. Согласование вибратора с выходом АП сводится к компенсации большого реактивного сопротивления вибратора и трансформации активного сопротивления несколько раз. Реализация СТЦ на элементах с конечными потерями приводит к снижению КПД АПА в целом. Существенно при этом увеличить сопротивление короткого вибратора, ком1енсировать Ха и тем самым упростить задачу согласования включением индуктивностей [43]. Проследим зависимость входного сопротивления Za=Ra+jX короткого симметричного вибратора от величины включенных в рассечку тока индуктивных сопротивлений Хн на расстояниях s=Zl симметрпчйо относительно точки питания. С увеличением Хн от нуля в сторону больших положительных значений реактивная часть входногс сопротивления Ха переходит из области отрицательных в област\> положительных значений через точку последовательного резонанса Хи в которой Ха=0. При дальнейшем увеличении Х величина Х возрастает, и в точке Хн2 наблюдается параллельный резонанс, где Х скачком переходит в емкостную область и далее, асимптотически приближаясь к реактивному сопротивлению симметричного вибратора с длиной плеча 1=Zl. Этот результат очевиден из физических соображений. Увеличение Хн от Х 2 до бесконечности приводит к снижению амплитуды тока на участке вибратора от Zl до I, поэтому он практически не участвует в излучении и величина входного сопротивления определяется длиной плеча Zl. Зиачения Xhi и Хнг зависят от Zl/1, с приближением Zl/I к 1 величины X i и Х 2 смещаются в сторону больших значений, одновременно с этим уменьшается разность Х 2-Xhi. Зависимость активной составляющей Rz=Ra{X ) имеет вид резонансной кривой и достигает максимума в точке параллельного резонанса. Подбором укорачивающей реактивности Х можно компенсировать реактивную составляющую входного сопротивления вибратора Ха и повысить его активную составляющую. В связи с этим с практической точки зрения наиболее интересным является случай, когда в плечо вибратора включена нагрузка Хн =Хн1, соответствующая последовательному резонансу входного сопротивления. Рассмотрим этот случай более подробно. На рис. 3.3 и 3.4 показана зависимость активной части входного сопротивления Za вибратора, соответствующего точке последовательного резонанса (Ха = 0), от zjl для вибраторов с длиной плеча /Д=0,15; 0,1 и 0,05 и когда в точке zl в оба плеча включены катушки индуктивности с L=Xh /ш и добротностью Q. Из графиков следует, что увеличение Rz тем больше, чем ближе индуктивности к концам вибратора, чем ниже их добротность и чем короче плечо вибратора. Значительная часть входного сопротивления обусловлена потерями в катушке, что особенно сильно проявляется для вибраторов малой длины. Входное сопротивление является суммой увеличенного сопротивления излучения и сопротивления, обусловленного потерями в катушке. Последняя составляющая сопротивления не является точно сопротивлением катушки, поскольку ток в точке размещения нагрузки отличается от тока возбуждения [43]. В меньшей степени увеличение входного сопротивления Ра зависит от радиуса вибратора. Так, изменение а/Я в Зра- за (от 0,001 до 0,003) приводит к снижению Ra примерно на 20% при Q = 100 и на 10% при Q=250 для Я=0,05. Таким образом, включение резонансной индуктивности в рассечку вибратора позволяет существенно повысить входное сопротивление Rz и облегчить задачу его согласования с нагрузкой. во во W го
о 0,25 0,5 0,75 zjl Рис. 3.3. Зависимость активного входного сопротивления от места включения Хн1 ВО ВО ¥3 20
0,25 0,5 0,75 T-Jln, Рис. 3.4. Зависимость активного входного сопротивления от места включения Хв1 Коэффициент полезного действия вибратора определяется соотношением между мощностью излучения и мощностью тепловых потерь в активных сопротивлениях укорачивающих катушек. Рассмотрим зависимость КПД нагруженного линейного вибратора от его размеров /Д и сД, места подключения укорачивающих катушек и их добротности. На рис. 3.5 и 3.6 показана зависимость 0,6 0,4
0 0 0,75 zji Рис. 3.5. Зависимость КПД от места включения Х-в.\ 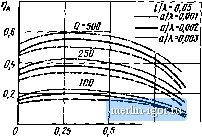 0.75 zjl Рис. 3.6. Зависимость КПД от места включения Хъ1 КПД ОТ положения zll резонансной катушки при тех же значениях параметров, что и на рис. 3.3, 3.4. Кривые, характеризующие зависимость т]а=т] (Zzj ) (см. рис. 3.5 и 3.6) для всех значений Q имеют тупой максимум при i, =0,2-f-0,4. Наличие максимума говорит о том, что укорачивающие катушки, включенные в рассеч-
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||