
|
| |
|
Строительный блокнот Климатические воздействия на АЭМП размерного показателя Я*, который можно трактовать как некоторую силу, отнесенную к единице объема: Я* = fэм/(/ш)o Но, где /ш -МДС обмотки; Ос - радиус сердечника; цо -магнитная постоянная. В большинстве конструкций электромагнитов тяговое усилие существенно зависит от рабочего зазора. Однако по абсолютному значению рабочего зазора нельзя судить о его относительной велич/ине. При оценке рабочего зазора необходимо оперировать с относительным значением зазора 6*=й/0с. С учетом приведенных соображений, сравнение различных типов электромагнитов с втягивающимся сердечником целесообразно производить, исходя из зависимости П*{6*). На рис. 15 изображены зависимости Я* (б*) для электромагнитов [10, 18, 20] с различной формой взаимодействующих поверхностей сердечника и полюса. Характер приведенных зависимостей полностью распространяется и на АЭМП, конструкция которых не содержит разделительной трубки. Из всего многообразия конструкций электромагнитов электромагниты с втягивающимся сердечнико.м наиболее просто и надежно сочетаются с большинством конструкций исполнительных механизмов трубопроводной арматуры. Из рис. 15 видно, что электромагниты с втягивающимся сердечником и ненасыщенным ферромагнитным шунтом (поз. в, кривые 6, 7) характеризуются большим начальным тяговым усилием и его постоянством при значительных изменениях значения рабочего зазора. Изменяя высоту ферромагнитного шуита Лш (рис. 15,в), можно в относительно широких пределах изменять длину пологого участка тяговой характеристики, а следовательно, и рабочего хода сердечника при практически неизменном начальном тяговом усилии. Эта особенность электромагнитов с ферромагнитным шунтом обусловливает высокую эффективность их применения в арматуростроении, так как позволяет создать унифицированную конструкцию АЭМП для управления исполнительными механизмами арматуры с различными диаметрами условного прохода и различными кинематическими схемами. В АЭМП такой конструкции можно в широком диапазоне менять форму тяговой характеристики и за счет изменения насыщения шунта прн изменении рабочего зазора. Однако такой путь имеет существенный недостаток, так как магнитные характеристики ферромагнитных материалов обычно меют значительный разброс. Поэтому если магнитная система АЭ.1П не насыщена и основное магнитное сопротивление определяется зазорами, то тяговая характеристика от образца к образцу будет иметь меньший разброс, чем у АЭМП с насыщенным магнитопроводом. Учитывая также; что ненасыщенный электромагнит требует меньшей МДС срабатывания, чем насыщенный, при проектировании необходимо предусмотреть, чтобы магнитопровод АЭМП в момент трогания сердечника не был насыщен. Формирование тяговой характеристики. Расширение диапазона перепада давления рабочей среды и условных диаметров прохода исполнительных механизмов, повышение их надежности и циклического ресурса связаны с применением эффективных конструктивных и схем-яых решений, направленных на рациональное согласование тяговой характеристики АЭМП с силовой характеристикой исполнительного механизма. Широкие возможности в этом направлении обеспечивают АЭМП с регулируемой тяговой характеристикой. 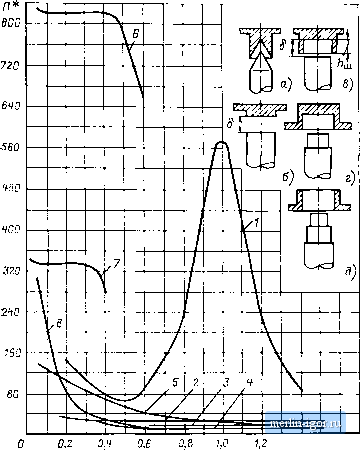 Рис. 15. Зависимости Я*(б*) для электромагнитов с втягивающимся сердечником: / - с насыщенным ферромагнитным шунтом (поз. в); 2 - сердечник со ступенчато-цилиндрическим концом (поз. д); 3 - сердечник с цилиндрическим концом (поз. г): 4 - сердечник с цилиндрическим концом, полюс отсутствует; 5 - сердечник с коническим концом 60° (поз о); 6, 7 - сердечник с ненасыщенным ферромагнитным шунтом (поз. в); 8 - сердечник с плоским торцом (поз. б) Формирование тяговой характеристики АЭМП с целью ее согласования с силовой характеристикой исполнительного механизма осуществляется следующими основными способами. 1. Конструктивные способы. 1.1. Выбор формы взаимодействующих поверхностей сердечника и полюса: с плоскими торцами, с коническими торцами, с торцами в виде усеченного конуса, с ферромагнитным шунтом, с плоским, суживающимся или ступенчато-цилиндрическим торцом сердечника при отсутствии полюса. 1.2. Выполнение магнитной системы без магнитопровода только с катушкой и сердечником. Типовая характеристика имеет максимум электромагнитной силы при некотором положении сердечника, которая затем снижается. При симметричном расположении сердечиика относительно обмотки сила падает до нуля, а затем меняет свой знак. 1.3. Применение дополнительного подвижного полюса - двух- и трехзазорные АЭМП [15, 27]. 1.4. Выбор формы взаимодействующих поверхностей сердечиика и охватывающего его фланца ( воротничка ): с цилиндрической боковой поверхностью воротничка и конической поверхностью сердечиика, с цилиндрическими боковыми поверхностями сердечника и воротничка . 1.5. Выполнение магнитопровода с изменяющейся геометрией: с полюсом, состоящим из двух или более подвижно связанных друг с другом частей, с сердечником, состоящим из двух или более частей. 1.6. Применение вставок из магнитно-твердых материалов. 2. Механические способы. 2.1. Упругая связь сердечника с запирающим элементом. 2.2. Предварительный свободный разгон сердечника. В этом случае при отсутствии тока в обмотке сердечник не имеет жесткой механической связи с запирающим элементом. Эта связь возникает лишь после того, как сердечник пройдет часть хода и накопит определенное количество кинетической энергии. 2.3. Применение механического передаточного устройства в виде кулачка скольжения. 3. Электрические способы. 3.1. Импульсное питание обмотки. 3.2. Форсировка пускового тока. 3.3. Комбинированное питание переменным и постоянным током. В этом случае питание обмотки при перемещении сердечника производится переменным током, а для удержания сердечника у полюса используется постоянный (пульсирующий) ток. 3.4. Изменение тока в обмотке. Тяговая характеристика АЭМП может быть регулируемой и нерегулируемой. Характерные способы согласования нерегулируемой тяговой характеристики АЭМП с силовой характеристикой исполнительного механизма иллюстрируются рис. 16. 60 Регулируемая тяговая характеристика получится при изменении тягового усилия в различных точках рабочего зазора с помощью соответствующих изменений геометрической формы и взаимного расположения взаимодействующих поверхностей сердечника и полюса. АЭМП с регулируемой тяговой характеристикой могут быть как с изменяющимся, так н с неизменным рабочим ходом сердечиика. В ряде конструкций для регулироваиия тягового усилия требуются демонтаж и разборка АЭМП или исполнительного механизма. На рис. 16,0 изображен АЭМП, состоящий из сердечника 1, обмотки 2, полюса и корпуса 6. Полюс выполнен из телескопических элементов 3-5, подвижных относительно друг друга. При отсутствии тока в обмотке 2 телескопические элементы либо занимают положение, показанное на рис. 16,а, либо находятся во виутревней полости элемента 5. В положении, изображенном на рисунке, они могут удерживаться либо с помощью специальных пружин, либо под действием силы, обусловленной остаточной индукцией. При подаче напряжения на обмотку 2 торец сердечника 1 последовательно воздействует на торцы элементов-3-5. которые входят друг в друга. При этом изменяются площадь сечения рабочего зазора и, следовательно, значения магнитной индук- 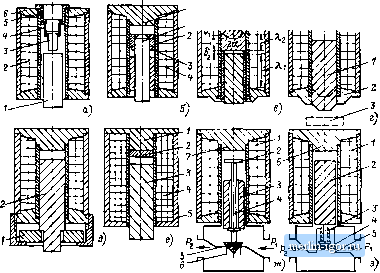 Рис. 16. Способы согласования тяговой и силовой характеристик: а - полюс АЭМП в виде телескопических элементов; б - сердечник АЭМП в виде стержня и втулки, ограниченно подвижных относительно друг друга; в - АЭМП с промежуточным сердечником а двумя рабочими зазорами; г - нижний торец сердечника конусный илн с цилиндрическим буртиком; d - сердечник выполнен из стержня и шайбы, ограниченно подвижных относительно друг друга; е - магнитопровод снабжен шайбой из магнитно-твердого материала; ж - сердечник имеет предварительный свободный разгон; э - сердечник связан с запирающим элементом посредством пружины ции и электромагнитного усилия. Рассмотренное конструктивное решение позволяет уменьшить начальный рабочий зазор при большом ходе сердечника, увеличить проводимость рабочего зазора и начальное тяговое усилие АЭМП. Выбором числа, формы, конструкции и материала элементов 3-5 можно изменять тяговую характеристику АЭМП. Основными недостатками рассмотренного способа являются сложность изготовления и существенное сниженне эксплуатационно11 надежности. На рис. 16,6 изображен АЭМП, сердечник / которого снабжен подвижной втулкой 2. Перемещение втулки относительно сердечника ограничено штифтом 3. Втулка н сердечник выполняются из ферромагнитного материала, штифт - из немагнитного. При подаче напряжения на обмотку 4 втулка 2 перемещается к полюсу 5 на длину свободного хода втулки относительно сердечника. При этом зазор между взаимодействующими торцами втулки и полюса уменьшается, проводимость рабочего зазора в начале хода сердечника увеличивается и соответственно увеличивается начальное тяговое усилие. Применение такой конструкции наиболее целесообразно в длинноходовых АЭМП с ненасыщенной магнитной системой. Основным недостатком конструкции можно считать определенную сложность изготовления. На рис. 16,8 изображен АЭМП с промежуточным сердечником и двумя рабочими зазорами 6i и бг- Такое конструктивное исполнение позволяет уменьшить начальный рабочий зазор при большом ходе сердечника и увеличить начальное тяговое усилие АЭМП. На рис. 16,г изображен АЭМП с сердечником /, внешний торец которого выполнен конусным или с цилиндрическим буртиком. При конусной форме торца сердечника по мере приближения его к полюсу 4 увеличивается радиальный зазор во фланце 2, достигая максимального значения в конце хода сердечника. Перераспределение потоков в магнитной системе за счет плавного увеличения магнитного сопротивления зазора в области фланца позволяет уменьшить крутизну тяговой характеристики АЭМП в конце хода сердечника. Профилируя соответствующим образом внешний торец сердечника, можно получить форму тяговой характеристики, близкую к линейно возрастающей. При этом в начале движения сердечника его внешний конусный торец практически не оказывает влияние на магнитное сопротивление в области фланца и начальное тяговое усилие. При необходимости увеличить удерживающую силу АЭМП при притянутом к полюсу сердечнике внешний торец сердечника снабжается буртиком {3 на рис. 16,г), который-шунтирует паразитный зазор в области фланца 2 и снижает тем самым потери МДС. На рис. 16,(3 вместо подвижной втулки применена плоская шайба /, благодаря чему в первый момент срабатывания магнитопровод АЭ.МП представляет собой магнитную систему с внешним притягивающимся сердечником и малым рабочим зазором. Это позволяет значительно повысить начальное тяговое усилие АЭМП даже при наличии некоторого насыщения магнитной системы. На рис. 16,е изображен двухпозиционный поляризованный АЭМП, магнитная система которого содержит шайбу 2 из магнитно-твердого материала (постоянных магнит). Для перемещения сердечника подается импульс тока в обмотку 4, который намагничивает постоянный магнит 2, полюс /, сердечник 3 и ярмо 5. Когда сердечник притянется к полюсу, произойдет дополнительное намагничивание постоянного магнита 2. После прекращения импульса тока постоянный магнит поддерживает магнитный поток в магнитопроводе и создает силу, удерживающую сердечник у полюса. Для срабатывания АЭ.МП достаточен импульс, длительность которого равна временн срабатывания привода. Для отпускания сердечника необходимо подать импульс тока обратного направления, достаточный для размагничивания постоянного магнита 2. После окончания импульса сердечник под действием собственной массы и возвратной пружины (на рисунке не изображена) перемещается в исходное положение. Рассмотренная конструкция требует специального блока управления и характеризуется пониженной надежностью. Последнее объясняется тем, что если в результате попадания инородных частиц или по каким-либо другим причинам сердечник не успеет притянуться к полюсу в течение времгни длительности импульса, то произойдет отказ клапана. На рис. 16,3K изображен клапан с АЭМП, сердечник которого имеет предварительный свободный разгон (подъем). Прн подаче напряжения на обмотку / сердечник 3 начинает перемещаться вверх к полюсу 7 по штоку 4. После соприкосновения с упором 2 сердечник увлекает за собой шток 4, жестко связанный с запирающим элементом 5. Сила Гуд удара торца сердечника об упор и энергия удара Туд соответственно равны Fy = mvjt; Ty = mv\/2, где т - приведенная масса сердечника; и - конечная скорость сердечника в момент удара; t - время торможения сердечника. Отрыв запирающего элемента 5 от седла 6 корпуса клапана будет происходить за счет силы притяжения сердечника к полюсу и кинетической энергии, запасенной сердечником за время его свободного подъема (предварительного разгона). Недостаток этой конструкции заключается в том, что если вследствие попадания или отложения инородных частиц на пути перемещения сердечника снизится скорость его движения, то развиваемое АЭМП тяговое усилие может оказаться недостаточным для подъема запирающего элемента, что приведет к отказу клапана. Кро.ме того, для предварительного разгона сердечника необходимо увеличение габаритов конструкции. На рис. 16,3 изображена конструкция, в которой применен механический способ согласования тяговой и силовой характеристик, предусматривающий подъем запирающего элемента за счет потенциальной энергии сжатой пружины. При подаче напряжения на обмотку / сердечник 2 движется к полюсу 6, сжимая пружину 3. Характеристика
|