
|
| |
|
Строительный блокнот Климатические воздействия на АЭМП пружины такова, что 1гри некотором недоходе сердечиика до полюса ее усилия достаточно для отрыва запирающего элемента 4 от седла 5 корпуса клапана. Дальнейшее перемещение запирающего элемента 4 осуществляется за счет усилия разжимающейся пружины 3. В таких конструкциях АЭМП отрыв запирающего элемента от седла происходит при весьма малом рабочем зазоре. Недостатки конструкции: снижение надежности вследствие нестабильности характеристик пружии; некоторое усложнение конструкции и увеличение габаритов изделия. Конструкции АЭМП с регулируемой тяговой характеристикой обеспечивают: рациональное согласование тяговой характеристики АЭМП с силовой характеристикой различных типов исполнительных механизмов; существенное уменьшение габаритов, массы и потребляемой мощности АЭМП, повышение циклического ресурса, надежности и долговечности работы как АЭМП, так и арматуры в целом; широкую унификацию АЭМП за счет применения одного типоразмера привода с необходимыми исполнениями для ряда типоразмеров исполнительных механизмов, что сокращает затраты иа проектирование, изготовление и эксплуатацию арматуры в целом. К числу факторов, в известной мере сдерживающих широкое применение герметичных АЭМП с регулируемой тяговой характеристикой, относятся следующие: 1. Изменение в широких пределах тягового усилия при изменениях геометрической формы и расположения взаимодействующих поверхностей сердечника и нолюса резко выражено лишь при питании АЭМП постоянным током. При питании переменным током влияние указанных факторов сказывается значительно меньше; 2. Некоторое усложнение конструкции АЭМП. Однако иесмопря на эти факторы АЭМП с регулируемой тяговой характеристикой начинают все шире применяться в арматуростроении. 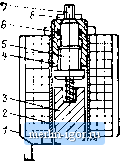 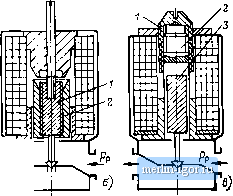 Рис. 17. АЭМП с регулируемой тяговой характеристикой: а, б - с изменяющимся рабочим ходом; в - с неизменным рабочим ходом На рис. 17 изображены герметичные АЭМП с регулируемой тяговой характеристикой. Конструкция на рис. 17,а предусматривает возможность регулироваиия тягового усилия непосредственно иа собранной арматуре без демонтажа и разборки привода или исполнительного механизма. АЭМП состоит из корпуса разделительной трубки 2, торец которой соедияен с неподвижной частью полюса 4, выполненной в виде вттулкн с (резьбой на виутреиией и наружной поверхностях. В центральной части полюса на резьбе размещена подвижнаи часть 5 полюса с хвостовиком 7. Сердечник 3 разме1цен внутри разделительной трубки, герметичность которой относительно внешней среды обес-печ1ивается с помощью уплотнения 6. Изменение тягового усилия производится изменением положения подвижной части полюса 5 посредством вращения хвостовика 7, который фиксируется с помощью гайкн 8. Такое решение наиболее эф-фект1ивно в АЭМП постоянного тока, тяговое усилие которых резко изменяется с изменением рабочего зазора. Однако при изменении положения подвижной части полюса изменяются высота подъема запирающего элемента 9 исполнительного механизма над седлом 10 и пропускная способность арматуры. Последнее же допустимо в весьма ограниченных пределах. В конструкции на рис. 17,6 тяговое усилие регулируется посредством изменения геометрической формы поверхности торца сердечиика, взаимодействующего с полюсом. Сердечник состоит из стержня / и втулки 2, подвижных относительно друг друга н соединенных с помощью резьбы. Втулка и стержень выполнены из ферромагнитного материала. Тяговая характеристиха конструкции формируется из двух тяговых характеристик, из которых одна соответствует электромагниту с конической формой торцов сердечиика и полюса, а вторая - электромагниту с цилиндрическим сердечником, входящим в глухое отверстие в полюсе. Выбором диаметров втулки 2 и стержня 1 можно изменять соотношение этих характеристик для получения требуемой результирующей тяговой характеристики. Согласование результирующей тяговой характеристики АЭМП с силовой характеристикой исполнительного механизма осуществляется изменением взаимного расположения втулки и стержня. Описанная конструкция может быть выполнена с разделительной трубкой. Конструкции, показанные на рис. 17,а, б имеют следующие недостатки: 1. Изменение тягового усилия связано с изменением рабочего хода сердечиика, а следовательно, и связанного с ннм запирающего элемента исполнительного механизма; 2. Для регулирования тягового усилия встроенных герметичных АЭМП (рис. 17,6) в большинстве конструкций арматуры требуется разгерметизация рабочей камеры исполнительного механизма и последующая сборка С контрольными измерениями регламентированных параметров. Широко применяются конструкции герметичных АЭМП, в которых тяговое усилие можно изменять без демонтажа и разборки и, следовательно, без разгерметизации рабочей камеры изделия, при этом рабочий ход сердечника не изменяется. Выше уже говорилось, что иа базе электромагнитов с втягивающимся сердечником и ненасыщенным ферромагнитным шунтом возможно создание унифицированных конструкций АЭМП с регулируемой тяговой характеристикой для исполнительных механизмов арматуры с различными условными диаметрами прохода и различными кинематическими схемами. Конструкция АЭМП с ненасыщенным ферромагнитным шунтом изображена на рис. 17,в. Полюс 2 снабжен подвижной ферромагнитной втулкой-шунтом 1. Изменением положения втулки / относительно сердечника 3 обеспечивается требуемое тяговое усилие в момент отрыва запирающего элемента от седла запорного органа исполнительного механизма. При этом высота подъема запирающего элемента над седлом и рабочий ход сердечника не изменяются. Регулировка тягового усилия осуществляется без демонтажа и разборки АЭМП и исполнительного механизма. Тяговая характеристика таких АЭМП при ненасыщенном шунте ие имеет провалов. При этом когда сердечник подходит к полюсу, но еще не вошел в полость втулки (Ь=кш, рис. 15,в), тяговое усилие резко возрастает. После вхождения сердечника во втулку тяговое усилие почти не изменяется, начиная заметно возрастать только в конце хода сердечника. Для большинства НЗ клапанов с подачей рабочей среды на запирающий элемент наибольшее тяговое усилие необходимо в начале хода. В начале хода сила, противодействующая движению сердечника, максимальна. На остальном пути значительная часть тягового усилия тратится на преодоление сил трения и противодействующего усилия упругих элементов. Поэтому обычно начало хода сердечника совмещают с моментом, когда плоскость торца сердечника совпадает с плоскостью торца шунта. При таком положении шунта обеспечивается наибольшее тяговое усилие при начальном рабочем зазоре, который в большинстве исполнительных механизмов соответствует началу перемещения сердечника и запирающего элемента. Наиболее перспективны конструкции АЭМП, в которых в начале хода сердечника магнитная система не насыщена, что обеспечивает минимальный объем обмотки. Отсутствие насыщения магнитопровода в момент трогаиия сердечника обеспечивает наиболее полное использование обмотки для создания полезного рабочего усилия АЭМП и уменьшает потребление электроэнергии. Характерные способы согласовании тиговой и силовой характеристик и области применения этих способов приведены в табл. 10. Компоновка АЭМП с исполнительным механизмом определяется следующими факторами: параметрами рабочей среды; типом и конструктивным исполнением АЭМП, характером перемещения выходного силового элемента (линейное, угловое); яз <: ж о п х п са о и ин BffOX -odii diaMBHff UHHaoifD Wai; -Э1Н1ГИЭХ К1ЧН -hOJuCMOwodu Э OJOHH9B13 -ffadoouBH Hdu HxdogEBd Ч1эоии1Гохдоэн неннэ -jiduHB аяннэ -OdlDB И1ГИ MOl iJHHHHOlOOy g go Ю о g .IJ (U О ю о я; л dj - - S S с < Ci CD S o § т м:: \п м:: Л\ А V/ Л + + + + + + + I I I + + + + + + I I I I + + + + -ь + -ь я а. в о . \*6 о со *о О, 2 о а: н £ 3 CD И со 5 S га 4, п S 3 в в ts о н га о 9-, к а = S га 3 OtD о Q. ,s U g S 5 - CI CQ m с S л\ л\ I I 1 -ь + + га § u to Hi 5 5.0 --of- * -Г rv га > ос g S s m rn о Ш M = ,J g 5 CCS* Способ Пренмушественная область применения
Изменение геометрической конфигурации рабочего зазора (рис. 17, б) Изменение геометрической конфигурации рабочего зазора с помощью ферромагнитного шунта (рис. 17, в) Механическая связь сердечника с запирающим элементом с помощью рычага с изменяющимся соотношением п.печ Форсировка тока обмотки с помощью контактного переключателя в схеме управления Форсировка тока обмотки в момент срабатывания с помощью бесконтактных переключателей в схеме управления Наличие в АЭМП последовательно включенных пусковой и удерживающей обмоток Удерживающая обмотка шунтируется контактом, связанным с сердечником Геркон, установленный вблизи рабочего зазора АЭМП и управляемый потоками выпучивания. После притяжения сердечника потоки выпучивания ослабляются и контакты геркона размыкаются, включая в цепь обмотки ограничивающий резистор Таблица И. Способы компововки АЭМП с исполнительным механизвюм и области их применения Способ компоновки Преимущественная область применения Констртсцня АЭМП встроенная блочная Непосредственного действия С промежуточным усилителем со свободно плавающим основным запирающим элементом с принудительным подъемом основного запирающего элемента Условный диаметр прохода, мм Прочие сведения АЭМП установлен на корпусе исполнительного механизма вертикально. Сердечник и запирающий элемент расположены на одной вертикали АЭМП установлен на корпусе исполнительного механизма вертикально. Оси сердечника и основного запирающего элемента расположены параллельно АЭМП установлен иа корпусе исполнительного механизма под углом к вертикали. Сердечник и запирающий элемент расположены на одной оси АЭМП установлен вертикально под корпусом исполнительного механизма. Сердечник и запирающий элемент расположены на одной вертикали <;250 <250 <25 <40 Перепад давления рабочей среды - от О до 30 МПа и более То же от 0,01 МПа в более От О до 2,5 МПа Температура рабочей среды 200 °С и выше
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||