
|
| |
|
Строительный блокнот Климатические воздействия на АЭМП ходиое положение. Во время рабочего цикла выполняется основная функциональная задача АЭМП - заданное перемещение на йо связанного с сердечником запирающего элемента и удержание его в конечном положении до отключения тока в обмотке. Удержание сердечника в крайнем положении может осуществляться с помощью механической защелки. Условия работы АЭМП определяются: конструкцией исполнительного механизма, видом его действия (НО или НЗ), функциональным назначением и эксплуатационными условиями, режимами работы, частотой включения, а также компоновкой узлов привод - исполнительный механизм. Управляемый АЭМП запирающий элемент может быть основным (рис. 4,5,а, в) или разгрузочным (рис. 6). В последнем случае перестановочное усилие значительно (до 1000 и более раз) меньше, чем требуется для перемещения основного запирающего элемента. Необходимый рабочий ход бо сердечника АЭМП определяется условным диаметром прохода Dy и конструкцией исполнительного механизма. В конструкциях с неподвижным седлом ход управляющего запирающего элемента бо во много раз меньше, чем в случае размещения его на перемещающемся основном запирающем элементе, что позволяет уменьшить габариты и потребляемую мощность АЭМП. Если воздействие перепада давления рабочей (вспомогательной) среды на чувствительный элемент усилителя (поршень, мембрану) недостаточно для заданного перемещения его, предусматривается механическая связь управляющего и основного запирающих элементов (рис. 5,6). При этом АЭМП перемещает как управляющий, так и основной запирающий элемент. В таких исполнительных механизмах [18, 23] АЭМП обеспечивает преодоление только сил, обусловленных массой основного запирающего элемента и связанных с ним деталей, а также воздействующих на него усилий упругих элементов. На протяжении рабочего цикла АЭМП проявляется действие различных сил: электромеханических, магнитных, массы подвижных деталей, связанных с сердечником, статических и динамических сил, обусловленных сжатой рабочей средой, сил деформации упругих элементов (пружин, уплотнений) и инерционных. Характер воздействия этих сил на сердечник АЭМП рассмотрен в [18, 19, 23]. На рис. 4 и 5 изображены графики сил, действующих в системе исполнительный механизм - электромагнитный привод для основных типов клапанов. На рис. 4,а изображена схема клапана непосредственного действия с подачей рабочей среды в направлении на запирающий элемент /. Для 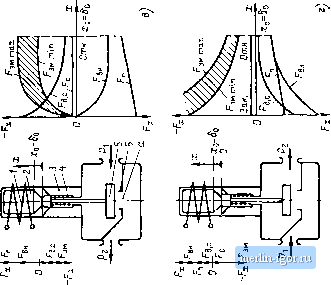 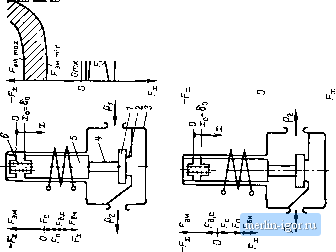 
2 л о. S S S S о л о, >. и >s <и а X <и S <и S §   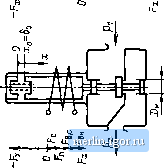 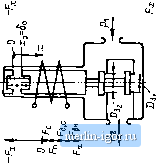 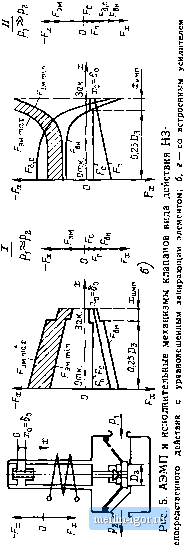 подъема запирающего элемента над седлом 2 корпуса 3 исполнительного механизма электромагнитный привод должен преодолевать на всем пути перемещения сердечника перестановочное усилие Fbh, являющееся равнодействующей сил давления рабочей среды на запирающий элемент /д.с, усилия Fn возвратной пружины 6, веса Fc сердечника 5. Для того чтобы АЭМП мог управлять работой исполнительного механизма, его тяговое усилие должно лежать в области, ограниченной кривыми эмт1п(дс) н Рэм тах{х) . ПрИ ЭТОМ Рэм min (х)>кРви(х), где А -коэффициент запаса по тяговому усилию. 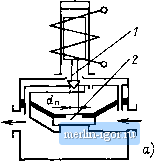 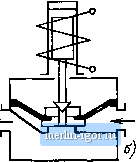 Рис. 6. АЭМП и исполнительные механизмы клапанов вида действия НЗ с усилителем и свободно плавающим основным запирающим элементом: а-неподвижное седло управляющего запирающего элемента; б-подвижное седло управляющего запирающего элемента Конструктивное исполнение исполнительного механизма, а также направление подачи потока рабочей среды (на или под запирающий элемент) определяют характер и направление сил, воздействующих на запирающий элемент при его различных положениях. Соответственно изменяется и силовая характеристика исполнительного механизма Fbh(x). Для больщинства НЗ клапанов, работающих при подаче рабочей среды на запирающий элемент, максимум тягового усилия АЭМП должен быть в момент отрыва запирающего элемента от седла, т. е. при максимальном зазоре бо (рис. 4,а и 5,с). Дальнейщее нарастание тягового усилия не требуется, так как на остальном участке пути преодолевается только усилие возвратной пружины и вес подвижных деталей, связанных с сердечником. Воздействие давления рабочей среды на запирающий элемент уменьшается по мере его удаления от уплотнительной по- верхности седла (рис. 4,а). У большинства АЭМП, особенно постоянного тока с плоской или конической формой взаимодействующих поверхностей сердечника и полюса, тяговая характеристика круто возрастает. При применении АЭМП с такой тяговой характеристикой для управления исполнительным механизмом НЗ клапанов в конце рабочего хода сердечника возникают динамические перегрузки. Методы устранения указанного явления будут рассмотрены в § 6. При управлении исполнительным механизмом НО клапанов (рис. 4,в,г) АЭМП должен преодолевать максимальное перестановочное усилие Рвк в конце рабочего хода сердечника, т. е. при минимальном рабочем зазоре. По этой причине для управления исполнительным механизмом НО клапанов целесообразно применять АЭМП с круто возрастающей тяговой характеристикой. Условия работы АЭМП распределительных и запорных клапанов непосредственного действия принципиально одинаковы. В распределительных клапанах с промежуточным усилителем АЭМП воздействуют только на механически связанный с сердечником управляющий запирающий элемент. Условия работы таких АЭМП аналогичны условиям работы в запорных НО и НЗ клапанах. На рис. 7 изображены схемы АЭМП с исполнительным механизмом распределительного клапана непосредственного действия. Запирающий элемент 1 исполнительного механизма с помощью штока 2 связан с сердечником 5 АЭМП толкающего типа. Исполнительный механизм снабжен патрубками А, Б, В, между которыми осуществляется распределение потока рабочей среды. Клапан на рис. 7,а обеспечивает подачу рабочей среды в патрубок Б из патрубка А или из патрубка В корпуса 6. При отсутствии тока в обмотке 4 запирающий элемент / под действием пружины 7 перекрывает проходной канал в седле а и рабочая среда поступает из патрубка В в патрубок Б. Герметичность уплотнения в седле а обеспечивается давлением среды на неразгруженную поверхность запирающего элемента и усилием пружины 7. При подаче напряжения на обмотку 4 сердечник 5 перемещается к полюсу 3, посредством штока 2 отводит запирающий элемент / от седла а и прижимает его к седлу б. Поступление рабочей среды из патрубка В в патрубок Б прекращается. В патрубок Б поступает рабочая среда из патрубка А. Герметичность уплотнения в седле б обеспечивается толкающим усилием АЭМП. Для работы ислолнитель-ного устройства требуется определенное толкающее усилие АЭМП при двух значения б: при открытии канала в седле а и перекрытии канала ч седле б. Корпус исполни- тельного механизма рис. 7,6 имеет только одно седло с проходным каналом. Соответственно запирающий элемент имеет одно верхнее уплотнение. Рабочая среда подается в патрубок А. При отсутствии тока в обмотке 4 проходной канал в седле а перекрыт и рабочая среда поступает из патрубка А в патрубок В. Герметичность уплотнения в  Рис. 7. АЭМП и исполнительные механизмы распределительных клапанов: а - с двусторонним уплотнением запирающего элемента; П - с односторонним уплотнением запирающего элемента седле а обеспечивается давлением рабочей среды на неразгруженную поверхность запирающего элемента и усилием пружины. При подаче напряжения на обмотку 4 сердечник перемещается к полюсу и посредством штока отводит запирающий элемент от седла, преодолевая давление рабочей среды и усилие пружины. Рабочая среда из патрубка А начинает поступать также в патрубок Б. После снятия напряжения с обмотки запирающий элемент под действием пружины возвращается в исходное положение и поступление рабочей среды в патрубок Б прекращается. В отличие от схемы рис. 7,а от АЭМП требуется определенное толкающее 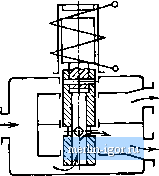 Рис. 8. АЭМП и исполнительный механизм распределительпого клапана непосредствепного действии с цилиндрическим запирающим элементом
|
|||||||||||||||||||||