
|
| |
|
Строительный блокнот Модули управления шаговыми двигателями МОДУЛИ УПРАВЛЕНИЯ ШАГОВЫМИ ДВИГАТЕЛЯМИ наборы NK303, МК304, МК305 Предлагаемые наборы позволяют легко изготовить блок управленгщ или организовать компьютерное управление шаговыми электродвигателями, широко применяемыми в различных приборах и устройствах как бытового, так и промышленного назначения. Шаговые двигатели можно использовать, например, для вращения новогодней елки или лабораторной колбы, для перемещения координатного стола или печатающей головки принтеров, в различных сканирующих и дискретных системах управления. При этом двигатель может вращаться в обоих направлениях и с разной скоростью. В приведенных примерах для использования двигателей постоянного или переменного тока потребуются редукторы и гораздо более сложные схемы, чтобы управлять скоростью и направлением вращения вала. При этом энергетические и финансовые затраты будут значительно выше, чем в случае применения шагового двигателя. Двигатель называется шаговым, потому что его ротор перемещается шагами. Шаги эти очень маленькие. Один шаг - это единичное угловое перемещение ротора на величину от 1 до 10°. Величина шага определяется главным образом конструкцией ротора и статора и зависит от количества секций обмоток возбуждения. Дискретное угловое перемещение ротора (поворот вала двигателя) происходит при подаче импульсов тока на эти обмотки. Чем больше имеется секций, тем на меньший угол можно провернуть вал. Фактически количество секций обмоток определяет точность работы двигателя - его способность обеспечить минимальный поворот при подаче одного импульса управления. Существует множество электронных схем управления шаговыми двигателями. Но все они реализуют главный пргшцип управления: обеспечивают подачу на обмотки двигателя так называемую бегущую единицу . При последовательной подаче импульсов тока происходит непрерывное вращение вала дветателя. Противоположное вращение вала обеспечивается изменением очередности включения обмоток. С помощью импульсных сетналов вращение ротора дветателя почти мгновенно можно остановить или изменить на противоположное направление. Импульсный характер управления шаговым двш:ателем идеально реализуется цифровой технгпсой. Становится возможным решать очень сложные задачи, связаи- ные с программным перемещением объектов, и автоматизгфовать дли-[тельные во времени процессы путем использования компьютеров или [контроллеров. При этом количество программно управляемых шаговых 1двигателей может быть любым. Уникальные свойства шагового двигате-1ля и особенности конструкции позволяют легко преобразовать враща-I тельное движение вала двигателя в поступательное движение. Наиболее часто применяются 6-выводные двигатели с четырьмя [обмотками. Они обеспечивают достаточную точность поворота и име-I ют компактную конструкцию. Каждая обмотка такого двигателя име-[ет 12 секций, что обеспечивает минимальный угол поворота 7.5°. Эти [параметры двигателя позволяют применять его при решении очень [многих задач. Поэтому устройствоуправленгш двттеля должно быть I надежным, легким в изготовлении и недорогим. 1абор NK303 Устройство управления, которое можно собрать из набора NK303, [обладает вышеприведенными качествами, позволяет регулировать частоту и направление вращения двигателя. Технические характеристики [Напряжение питания [В]............................................................................................6-12 [Ток нагрузки [А].................................................................................................................1.5 Диапазон регулировки частоты [Гц]..................................................................15240  Рис. 1. Блок управления шаговым двигателем 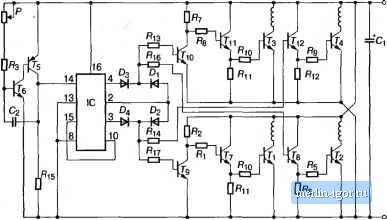 gnd 1 Рис. 2. Электрическая схема блока управления Таблица 1. Перечень элементов набора NK303
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||