
|
| |
|
Строительный блокнот Развитие полупроводниковой электроники контроллеров. Так, к примеру, процессор КР580ИК80А позволяет производить опрос до 256 портов. Микроконтроллер по программе сравнивает измеренные эначвиня параметров с их заданными значениями и в зависимости от результата сравнения вырабатываег управляющие сигналы. Некоторые управляющие сигналы могут 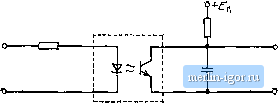 Рис. Б.2. Оптронная электрическая изоляция быть преобразованы в аналоговую форму с помощью цифро-аналоговых преобразователей (ЦАП). Выводы микроконтроллеров, на которых действуют цифровые сигналы, соединяются с каналами связи опять-таки через оптронные устройства электрической изоляции. Наконец, по каналам связи управляющие сигналы поступают к исполнительным органам, воздействующим на ход процесса. Такова самая общая схема системы непосредственного цифрового управления. Иногда отдельные детали этой схемы могут отсутствовать, например измерение значений параметров и ввод этих значений в микроконтроллер. В этом случае иногда говорят о жестком программном управлении. Так, встроенный микроконтроллер стиральной машины задает программу ее действий, но не осуществляет контроля этих действий, поскольку имеется в виду, что поданные команды обязательно будут выполнены. Иногда отсутствуют детали, связанные с передачей к процессору управляющих сигналов. Тогда говорят о системе телесигнализации. Микроконтроллер устанавливает факт отклонения значений параметров от заданных н сообщает об этом человеку-оператору, который н принимает необходимое решение. Так или иначе, но главные специфические особенности микроконтроллеров остаются неизменными. Когда число измеряемых параметров велико, то нецелесообразно передавать все нх значения по каналам связи. Но могут существовать условия, исключающие возможность располагать микроконтроллер в непосредственной близости от управляемого процесса, например наличие мощных электрических и магнитных полей (в системах с электроприводом), способных вызывать сбои в работе микроконтроллера. Тогда систему делят на части. Скажем, АЦП, ЦАП и специальный процессор, задающий режим опроса, вместе со средствами утации располагают в непосредственной близости от процесса, а все ое оборудование микроконтроллера относят на заданное расстояние и остал встроенной частью одним-едннственным каналом связи. Получаем связывают с определенную многопроцессорную систему. так называему .дроцессорных распределенных систем характерно для сов- Построение М QJQд.I.poллepoв. Здесь снова следует указать, что воз- ременной техники Р габаритные размеры, малая потребляемая мощность и можности БИС: малые способность работать в большом диапазоне изменения температуры внешней среды (БИС серии К588 работают при изменении температуры окружающей среды от -60 до +85°С) - позволяют без особых трудностей строить распределенные многопроцессорные системы. Такие системы естественным образом возникают и тогда, когда сам объект управления (например, сеть железных дорог) существенным образом распределен в пространстве. Рассмотрим кратко конструкции ЦАП н АЦП. Типовая схема ЦАП приведена на рнс. 5.3. Здесь для простоты показаны механические переключатели, 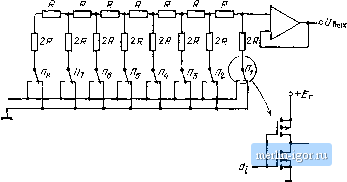 К резистору Рис. 5 3. Цифро-аналоговый преобразователь роль которых выполняют комплементарные транзисторные пары. Проделав простейшие вычисления на оонованин законов Кирхгофа, читатель легко придет к выводу, что выходное напряженне схемы равно /вых = п(%-2- -f 02-2-2-4- ... +а,.2-8). Если переключатель Я, находится в левом (по схеме) положении, каждая переменная а,- принимает значение 1 и подключает соответствующий резистор к источнику напряжения Еп. Если переключатель Yli находится в правом положении, переменная йг принимает значение О и подключает соответствующий резистор к точке нулевого потенциала. Одна из возможных схем АЦП показана на рис. 5.4,а. Принцип его действия с достаточной полнотой иллюстрируется рис. 5.4,6. Поступающее из блока управления двоичное число преобразуется с помощью ЦАП в аналоговую форму и сравнивается со значением входного напряжения. Если при сравнении оказывается, что результат преобразования больше входного напряжения, двоичное число уменьшается вдвое и в соответствующем разряде записывается нуль. Остальное ясно из рисунка. Аналого-цифровой преобразователь представляет собой по существу вольтметр с цифровым отсчетом. Точность преобразовани? (измерения) у лучших современных образцов АЦП достигает сотых долей процента. Как ЦАП, так и АЦП изготовляют в виде СИС, и есть все основа ния считать их членами микропроцессорного комплекта. Несколько слов о программном обеспечении микроконтроллеров. В памят! микроконтроллера в общем случае может храниться большое число программ Объясняется это тем, что, во-первых, один микроконтроллер может управлять большим количеством процессов (каждым по своей программе), а во-вторых, режимы управления могут изменяться в зависимости от условий внешней среды, времени года, смены изготовляемых в результате технологического процесса изделий, а также в зависимости от целого ряда других факторов. Как бы ни велико было число разных программ, оно всегда ограничено, а сами программы известны заранее, поскольку они составляются и вводятся в контроллер в процессе проектирования и отладки системы непосредственного цифрового управления. Что же касается операционных систем и внутреннего 5ло/< управления ЦАГГ Преофазуемое о- Иапряженив  Схема сравнения Of f 00 О i О t Рис. 5.4. Аналого-цифровой преобразователь (а) и временная диаграмма его работы (б) (системного) программного обеспечения, то у микроконтроллеров оно, как правило, или полностью отсутствует, или же представлено в минимальной степени. Поскольку все режимы работы микроконтроллера, даже если нх очень много, известны заранее, потребность во внутреннем (системном) программном обеспечении отсутствует. Практически все ресурсы микроконтроллера могут быть направлены на выполнение его внешних функций. В этом коренное отличие микроконтроллеров от ЭВМ. Еще одна важная особенность программного обеспечения микроконтроллеров состоит в том, что хранящийся в памяти комплект программ обновляется только в исключительных случаях, например когда осваивается производство нового изделия или меняется технология. Все это вместе взятое позволяет широко использовать для хранения программ ПЗУ и ППЗУ. В частности, можно представить себе ряд стандартных программ - таких, как, например, программа циклического опроса результатов измерения параметров, программа решения обыкновенных дифференциальных уравнений, программа нахождения оптимального набора параметров методом линейного программирования н т. п., которые вводятся в ПЗУ на стадии его изготовления. Такие ПЗУ с набором стандартных программ должны и наверняка будут входить в состав микропроцессорных комплектов. Программы, отражающие специфику данного конкретного объекта (объектов) управления, вводятся в ПЗУ в процессе проектирования и отладки системы непосредственного цифрового управления. Наконец, небольшое число программ, относительно которых известно, что они могут под-
|